Вдохновленная тем, как легко люди обращаются с объектами, не видя их, команда, возглавляемая инженерами Калифорнийского университета в Сан-Диего, разработала новый подход, который позволяет роботизированной руке вращать объекты исключительно с помощью прикосновения, не полагаясь на зрение.
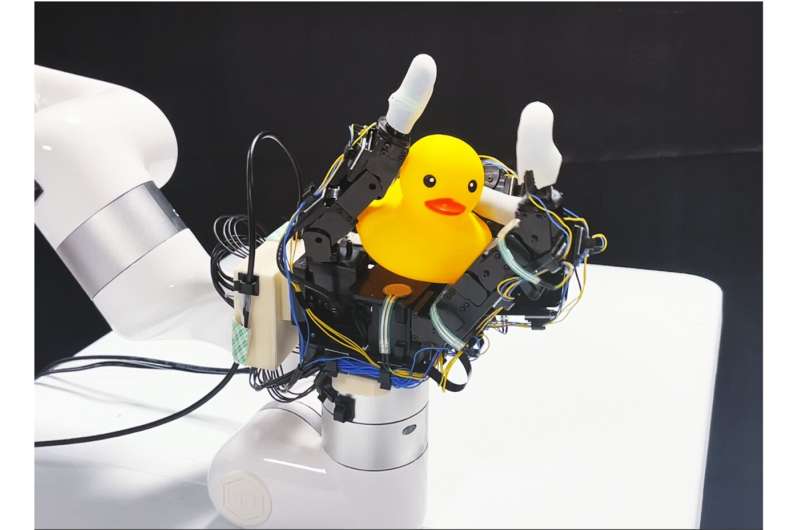
Используя свою технику, исследователи создали роботизированную руку, которая может плавно вращать широкий спектр предметов, от маленьких игрушек, банок и даже фруктов и овощей, не травмируя и не хлюпая ими. Роботизированная рука выполняла эти задачи, используя только информацию, основанную на прикосновении.
Эта работа могла бы помочь в разработке роботов, способных манипулировать объектами в темноте.
Недавно команда представила свою работу на конференции «Робототехника: наука и системы 2023», и их статья доступна на сервере препринтов arXiv.
Чтобы создать свою систему, исследователи прикрепили 16 сенсорных датчиков к ладони и пальцам четырехпалой роботизированной руки. Каждый датчик стоит около 12 долларов и выполняет простую функцию: определяет, прикасается к нему объект или нет.
Уникальность этого подхода заключается в том, что он основан на множестве недорогих сенсорных датчиков с низким разрешением, которые используют простые двоичные сигналы — касание или отсутствие касания — для выполнения роботизированного вращения рукой. Эти датчики расположены на большой площади роботизированной руки.
Это контрастирует с множеством других подходов, которые основаны на нескольких дорогостоящих сенсорных датчиках с высоким разрешением, прикрепленных к небольшому участку роботизированной руки, главным образом на кончиках пальцев.
Вдохновленная тем, как легко люди обращаются с объектами, не видя их, команда, возглавляемая инженерами Калифорнийского университета в Сан-Диего, разработала новый подход, который позволяет роботизированной руке вращать объекты исключительно с помощью прикосновения, не полагаясь на зрение. Автор: Бинхао Хуан
С этими подходами связано несколько проблем, объяснил Сяолун Ван, профессор электротехники и вычислительной техники Калифорнийского университета в Сан-Диего, который руководил текущим исследованием. Во-первых, наличие небольшого количества датчиков на руке робота сводит к минимуму вероятность того, что они соприкоснутся с объектом.
Это ограничивает чувствительность системы. Во-вторых, сенсорные датчики высокого разрешения, которые предоставляют информацию о текстуре, чрезвычайно сложно имитировать, не говоря уже о том, что они чрезвычайно дороги. Это усложняет их использование в реальных экспериментах. Наконец, многие из этих подходов по-прежнему основаны на видении.
«Здесь мы используем очень простое решение», — сказал Ван. «Мы показываем, что для выполнения этой задачи нам не нужны подробные сведения о текстуре объекта. Нам просто нужны простые двоичные сигналы о том, коснулись ли датчики объекта или нет, и их гораздо проще смоделировать и перенести в реальный мир».
Исследователи также отмечают, что наличие большого количества бинарных сенсорных датчиков дает роботизированной руке достаточно информации о трехмерной структуре и ориентации объекта, чтобы успешно вращать его без зрения.
Сначала они обучили свою систему, запустив симуляцию виртуальной роботизированной руки, вращающей разнообразный набор объектов, в том числе неправильной формы. Система оценивает, к каким датчикам на руке прикасается объект в любой заданный момент времени во время вращения. Он также оценивает текущее положение суставов кисти, а также их предыдущие действия. Используя эту информацию, система сообщает роботизированной руке, какой сустав должен быть перемещен в следующий момент времени.
Затем исследователи протестировали свою систему на реальной роботизированной руке с объектами, с которыми система еще не сталкивалась. Роботизированная рука была способна вращать различные объекты, не останавливаясь и не теряя хватки. Среди предметов были помидор, перец, банка арахисового масла и игрушечная резиновая уточка, которая была самым сложным предметом из-за своей формы. Вращение объектов с более сложными формами занимало больше времени. Роботизированная рука также могла вращать объекты вокруг разных осей.
Ван и его команда сейчас работают над расширением своего подхода к более сложным задачам манипулирования. В настоящее время они разрабатывают методы, позволяющие роботизированным рукам, например, ловить, бросать и жонглировать.
«Манипулирование руками — очень распространенный навык, которым владеем мы, люди, но роботам очень сложно им овладеть», — сказал Ван. «Если мы сможем наделить роботов этим навыком, это откроет двери для тех задач, которые они могут выполнять».